Object-Distributing Competition Robot
Challenge
As a team of four mechanical engineers, we were challenged to design a robot that completes a series of tasks involving the movement and distribution of various objects within a 3-minute round:
- Deposit 4 balls in the assigned color quadrant of the track's spinning centerpiece.
- Place a ring onto the 30" tall center post of the competition track.
- Push six 2" wood blocks into the designated 3" zone onthe track.
Alongside these tasks, the robot had to meet the following limitations:
- The robot must start the round in a 24" long, 12" wide, and 18" tall volume in the back of the competition track.
- Up to two motors, two pneumatic cylinders, two solenoids, and two mousetrap springs can be used as actuators.
- Sensors are limited to an IR sensor, rotary encoder, and three limit switches.
- Only $100 in materials beyond the actuators, sensors, and microcontrollers can be used.
Four teams compete simultaneously on the same competition track and are scored based on the number of tasks they successfully complete. Failure to meet the limitations results in dequalification. 64 teams participated total.

Competition track with four quadrants, 6 blocks in each quadrant, a spinning centerpiece and a 30" tall center post.
Responsibilities
- Oversaw the computer-aided design of the robot and its subsystems.
- Designed the motor-driven drivetrain, ring delivery subsystem, and block-pushing subsystem.
- Used my experience in fabrication to lead the prototyping of the competition robot.
- Led the writing of three reports for technical and non-technical audiences.
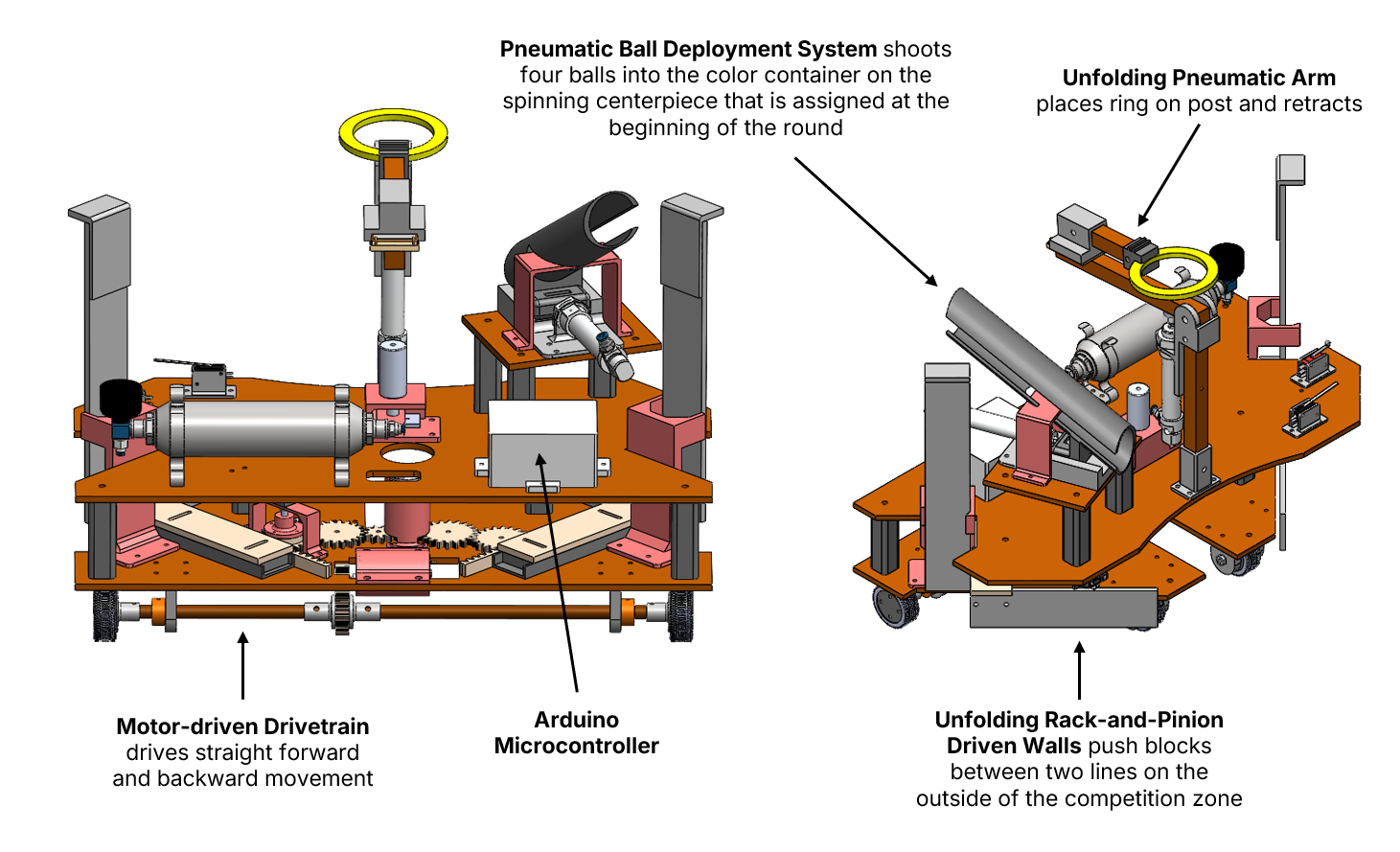
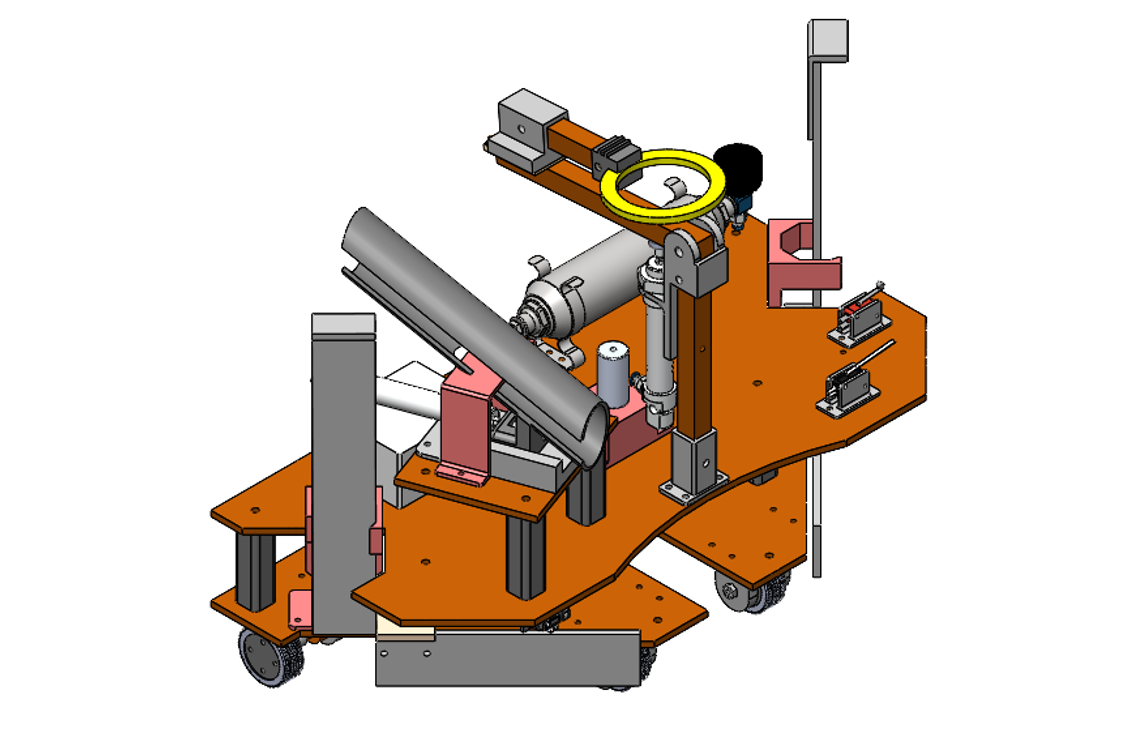
CAD model of the competition robot and its major subsystems.
Unfolding Block-Pushing Subsystem
This system creatively combines gravity, motor power, and a rotary encoder to precisely push three blocks on each side, spaced across 18 inches, while meeting the start-of-round dimensional requirements.
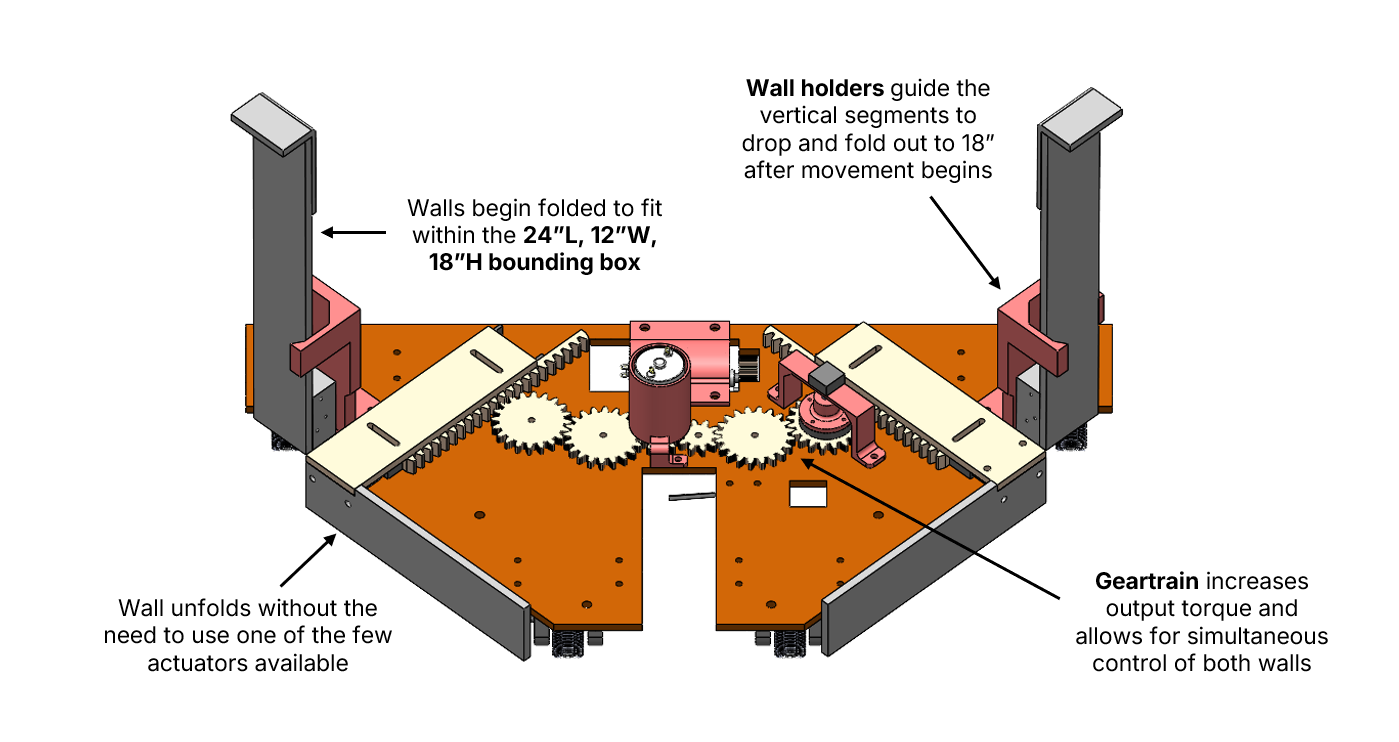
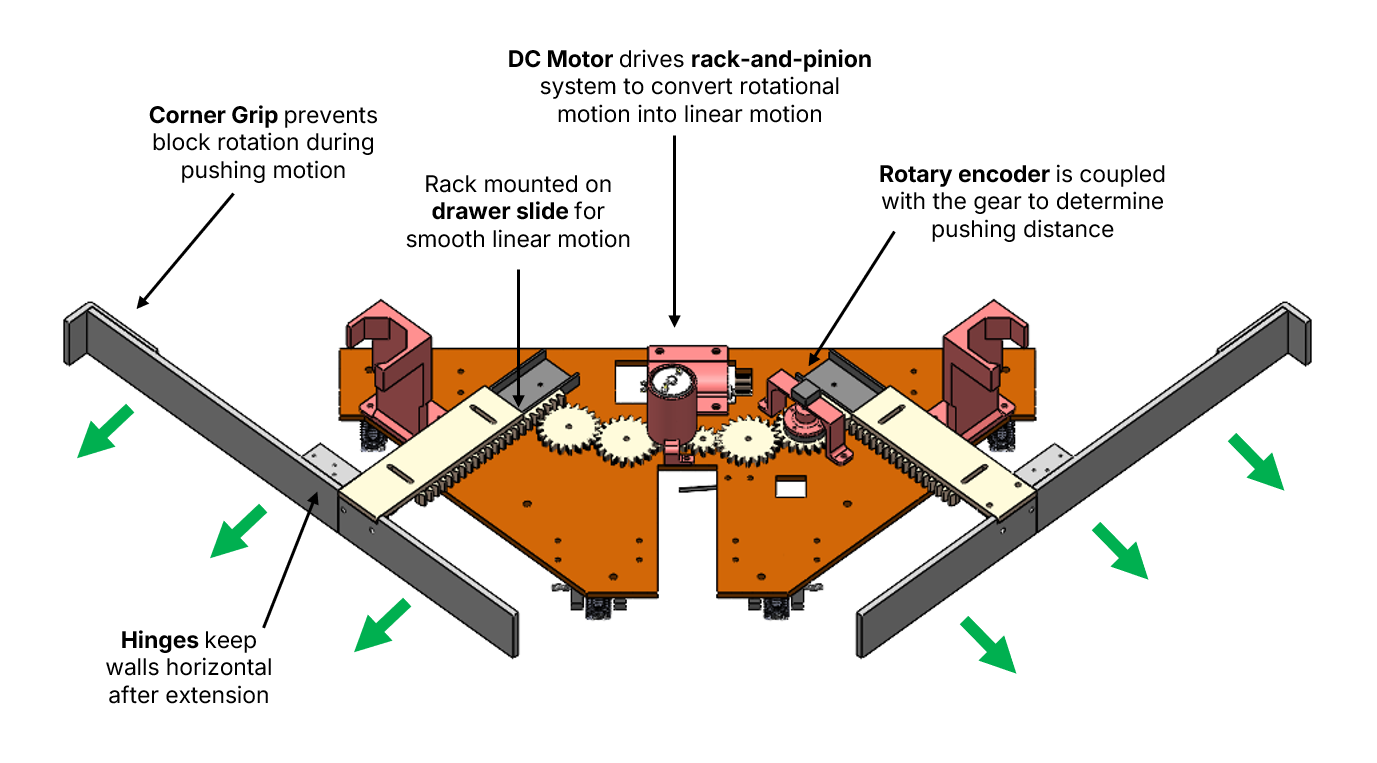
Block-pushing subsystem in the start-of-round position (top) and during pushing (bottom).
Ring Delivery Subsystem
This system uses a solenoid, mouse trap spring, and pneumatic piston to place a ring on the center post of the competition track that is taller than the start-of-round height limit.
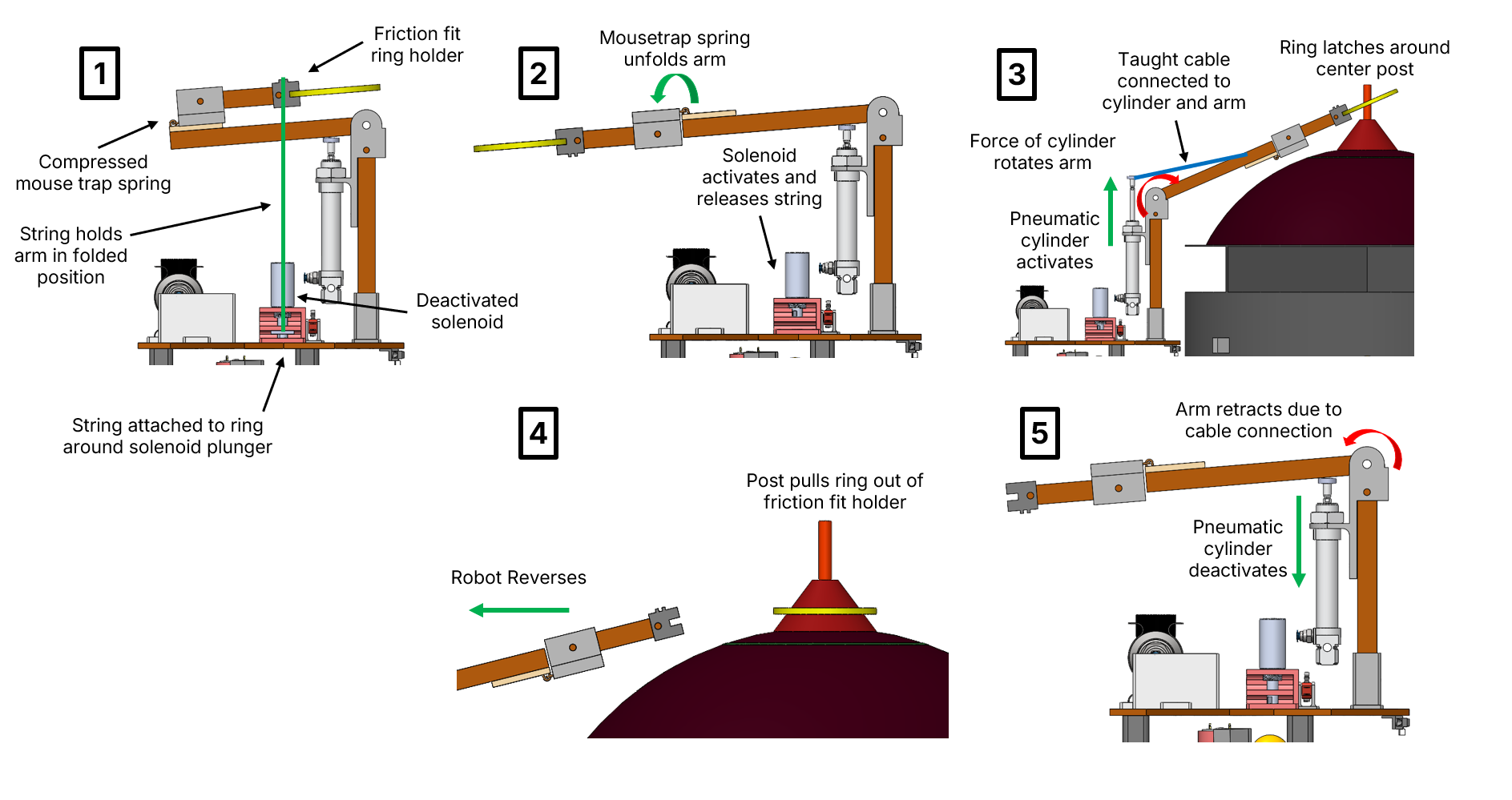
Illustration of the ring delivery arm (1) at the start of the round within the geometry limits, (2) unfolding after the round begins, (3) rotating to place the ring on the post, (4) releasing the ring, and (5) regressing from the center post.